- +1
光學精密工程·封面|基于雙目視覺的機械臂全空間標定
▍本文由論文作者團隊(課題組)投稿
隨著焊接工藝和質量要求的不斷提高,傳統的手工焊接難以滿足高質量、高效率、高精度和大規模生產的需求。同時,工業機械臂的智能化、柔性化、自動化和高可靠性等特點,使其成為焊接領域的重要設備之一,但是其重復性定位精度較高(0.05mm以內)而絕對定位精度較低(1~2mm)。離線編程作為焊接時主要的編程方式,對機械臂的絕對定位精度提出了很高的要求,否則會導致焊接過程中焊縫偏差、焊接深度不均、焊接質量下降等問題,嚴重時可能導致焊接失效,影響生產效率和產品質量。因此,為確保焊接質量和穩定性,需要對機械臂進行標定。
目前大多標定方法需依賴激光跟蹤儀展開,此設備價格昂貴且對使用環境要求較高,難以應用于工業現場。相比之下,雙目視覺測量相關技術具有成本低廉、便攜性好、測量精度較高、對測量環境要求低等優點,在三維測量坐標測量方面獲得廣泛應用。目前常采用基于運動回路法的運動學標定來提高機械臂絕對定位精度,但標定空間的大小限制了機器人全工作空間域絕對定位精度。
針對工業現場大規模應用標定技術的需求,天津大學的段發階、韓彭威等在《光學 精密工程》(EI、Scopus,中文核心期刊,《儀器儀表領域高質量科技期刊分級目錄》和《光學和光學工程領域高質量科技期刊分級目錄》“T1級”期刊)上發表了題為“基于雙目視覺與羅德里格斯旋轉的機械臂全工作空間域絕對定位精度提升方法”的封面文章。

圖1:2023年第8期封面
▍標定系統搭建
雙目視覺三維坐標測量系統是仿照人類視覺的原理,通過左右相機對同一個物體進行采集,實現空間三維坐標的測量,成像模型如圖2所示。在本文中,搭建如圖3所示的標定系統,機械臂運動學標定由四個步驟組成,即運動學建模、測量、參數辨識和誤差補償。首先對機械臂進行運動學建模,確定待標定的參數;同步控制器產生一個時鐘信號至雙目相機與機械臂控制柜,控制柜受同步信號的控制使機械臂進行單軸點動,雙目相機受同步信號控制進行采集,采集完成后機械臂回到初始正交位置,并進行下一個軸的單軸運動,直至六個關節軸全部完成采集,二維棋盤格靶標由工裝固定在機械臂的末端,由雙目相機負責記錄其位置變化;上位機負責記錄采集到的圖像并進行處理與解算,最終得到機械臂末端特征點的三維坐標;對各關節單軸旋轉軌跡進行分析,確定各關節軸旋轉軸線的直線方程,利用關節軸線之間的相對位置信息辨識運動學參數;將辨識到的參數代入建立的運動學模型中,利用含運動學參數誤差的離線補償算法求出實際關節轉角,直接在關節空間中進行補償。
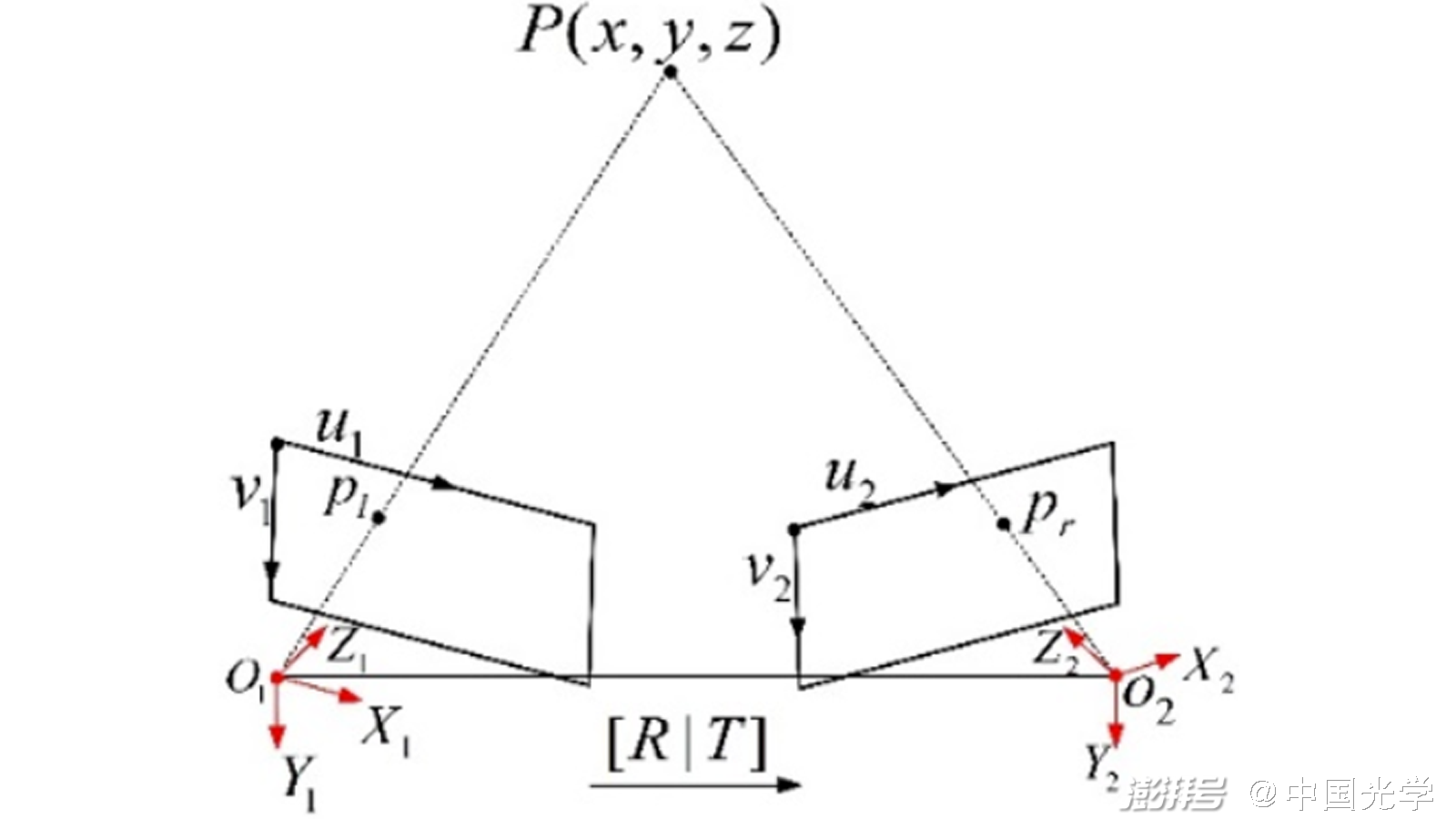
圖2:雙目視覺測量系統成像模型
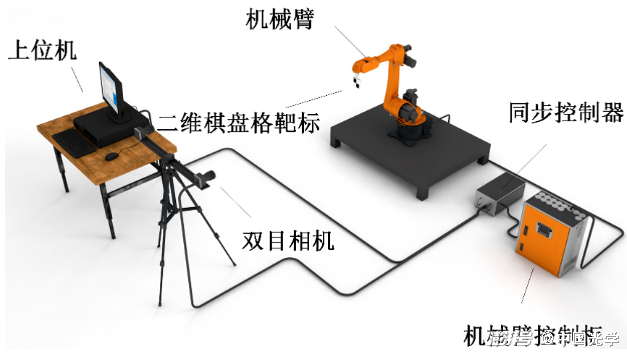
圖3:基于雙目視覺的機械臂運動學標定系統示意圖
▍基于羅德里格變換的空間圓擬合算法
根據空間圓軌跡p?(i=1,2,...,n),求解該軌跡所在平面法向量ni,圓心坐標ci以獲取轉軸的空間直線方程。由于空間圓擬合算法過于復雜,為提高計算效率,將空間圓轉化為平面圓來進行擬合求解,求解過程分為兩步:平面擬合和圓擬合。
使用svd算法擬合點集所在平面,再使用羅德里格變換將空間點投影至平面坐標系下,完成圓擬合。將理想圓上的點添加信噪比為30dB的隨機噪聲驗證其魯棒性,結果如圖4所示。同時構建了圓心角與擬合圓半徑誤差的關聯模型,確定了機械臂標定運動范圍,分析結果如圖5所示。

圖4:算法魯棒性測試
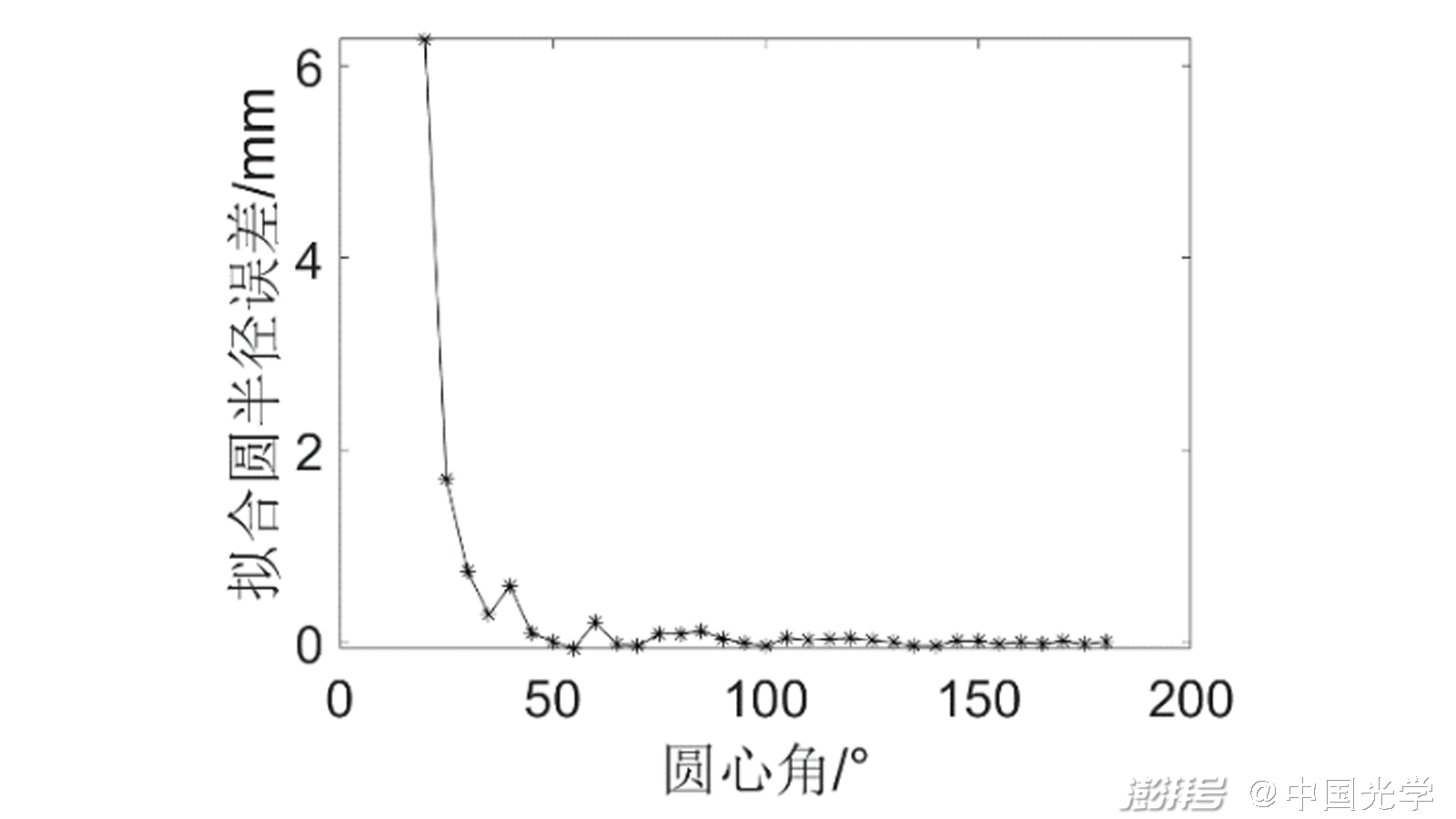
圖5:圓心角大小與擬合圓半徑誤差之間的關系
▍實驗及結果分析
同時采用文獻[1]中的算法、文獻[2]中的算法與機械臂標定軟件roboDyn對機械臂進行標定,并進行性能測試與本文方法做對比,實驗結果如圖6所示

圖6:不同算法性能對比試驗
從絕對定位誤差分布曲線對比可發現,對于文獻[2]采用的誤差模型易受標定空間的大小影響,標定空間內的點(圖中藍綠線上第5、6個點)精度較高,而雙目相機的視場較小,標定空間過小,在未標定的工作空間內精度較低;文獻[1]通過激光跟蹤儀對機械臂進行標定,增大標定空間,穩定性較好,與本文方法相當,但設備成本較高;roboDyn軟件效果最好,但是在使用激光跟蹤儀的基礎上引入T-mac傳感器,成本在文獻[1]的基礎上大幅提高。本文根據雙目相機視場相對較小這一特點,使用軸線測量參數識別模型解決了標定空間過小導致的外延差這一問題。測試結果表明,該方法能在較低成本以及較小標定空間的情況下有效的提升機械臂全工作空間域絕對定位精度。
▍工程應用前景
該研究提出了一種基于雙目視覺的機械臂標定方法,與激光跟蹤儀相比有絕對的成本優勢;利用羅德里格變換對軸線測量法進行了優化,與其他雙目視覺方法相比具有全空間誤差收斂性。以上特點使本方法能夠在工業現場進行大規模應用,降低了標定技術的使用門檻。
| 團隊負責人簡介 |

段發階,男,天津大學長聘教授,博士生導師,善測(天津)科技有限公司董事長,國家創新創業人才,國家重點研發計劃項目首席,教育部新世紀優秀人才,天津市教學名師,天津市青年科技獎獲得者,中國自動化協會理事,中國計量測試學會理事,全國幾何量長度計量技術委員會特聘委員。主要從事重大裝備在線檢測與健康監測、激光及光電測試技術、計算機視覺、海洋環境監測與水聲探測技術等方面研究工作,2001年在國內率先開展基于葉尖定時原理的航空發動機動葉片狀態參數在線測量方法研究,2015年完成科研成果轉化,研發產品實現產業化。獲國家科技進步二等獎1項,省部級科技進步二等獎1項,省部級自然科學二等獎1項,省部級科技進步三等獎2項、中國儀器儀表學會科學技術二等獎1項,國家級教學成果二等獎1項,省部級教學成果一等獎1項。在國內外期刊發表學術論文400余篇,其中SCI收錄80余篇,EI收錄80余篇,授權發明專利50余項,實現專利轉化19項。
| 團隊簡介 |
天津大學精密測試與在線檢測團隊依托精密測試技術及儀器全國重點實驗室,長期從事在線測量與設備健康監測技術、光電測量及計算機視覺檢測技術、海洋環境監測與水聲探測技術等方面的研究,在國內相關領域占據領先位置,先后獲得國家科技進步二等獎、國家教學成果二等獎、天津市專利金獎、中國“互聯網+”大學生創新創業大賽總決賽金獎等,成員先后獲得國家創新創業人才、國家級青年人才、中國科協青年托舉人才等榮譽稱號。

| 論文信息 |
韓彭威,段發階,李杰等.基于雙目視覺與羅德里格斯旋轉的機械臂全工作空間域絕對定位精度提升方法[J].光學精密工程,2023,31(08)
https://ope.lightpublishing.cn/thesis/65/36544533/zh/
【參考文獻】
[1] 符桂銘,郭文靜,耿濤,等. 基于雙目視覺和距離誤差模型的工業機器人運動學參數標定方法[J]. 機床與液壓. 2021, 49(15): 10-16.
[2] Chen, X, Liu, Y, Xu, Y, et al. Kinematic calibration of a laser tracker based on nonlinear optimization of a refined geometric error model[J]. Measurement.2022, 191, 110672.
[3] 于連棟,曹家銘,趙會寧. 關節臂式坐標測量機的運動學建模[J]. 光學 精密工程. 2021, 29(11): 2603-2611.
[4] Guo Y, Yin S, Ren Y, et al. A multilevel calibration technique for an industrial robot with parallelogram mechanism[J]. Precision Engineering. 2015, 40: 261-272.
[5] Zhang X, Song Y, Yang Y, et al. Stereo vision based autonomous robot calibration[J]. Robotics and Autonomous Systems. 2017, 93: 43-51.
[6] Wu L, Ren H. Finding the kinematic base frame of a robot by hand-eye calibration using 3D position data[J]. IEEE Transactions on Automation Science and Engineering, 2017,14(1):314-324.
[7] Marwan A, Simic M, Imad F. Calibration method for articulated industrial robots[J]. Procedia Computer Science, 2017,112:1601-1610.
本文為澎湃號作者或機構在澎湃新聞上傳并發布,僅代表該作者或機構觀點,不代表澎湃新聞的觀點或立場,澎湃新聞僅提供信息發布平臺。申請澎湃號請用電腦訪問http://renzheng.thepaper.cn。



- 報料熱線: 021-962866
- 報料郵箱: news@thepaper.cn
互聯網新聞信息服務許可證:31120170006
增值電信業務經營許可證:滬B2-2017116
? 2014-2025 上海東方報業有限公司